
矿卡无人驾驶_自动驾驶矿卡整体解决方案
发布日期:2022-05-18
浏览量:3602

自动驾驶自主算法
融合定位
利用多传感器融合的slam算法,构建高精度的三维重建点云和语义地图.并基于矿区高精度地图,矿卡车端融合实时的激光定位,视觉定位,语义定位,实现全天候矿区的厘米级定位系统。
感知识别
采用视觉与激光雷达等多传感器融合, 全方位全时段提供矿区环境的精准感知信息。
决策规划
在多应用领域的场景数据驱动下,提供支持矿区场景的兼顾安全、平顺和精准的预测、决策、规划和控制算法。
全场景 真无人 全天候
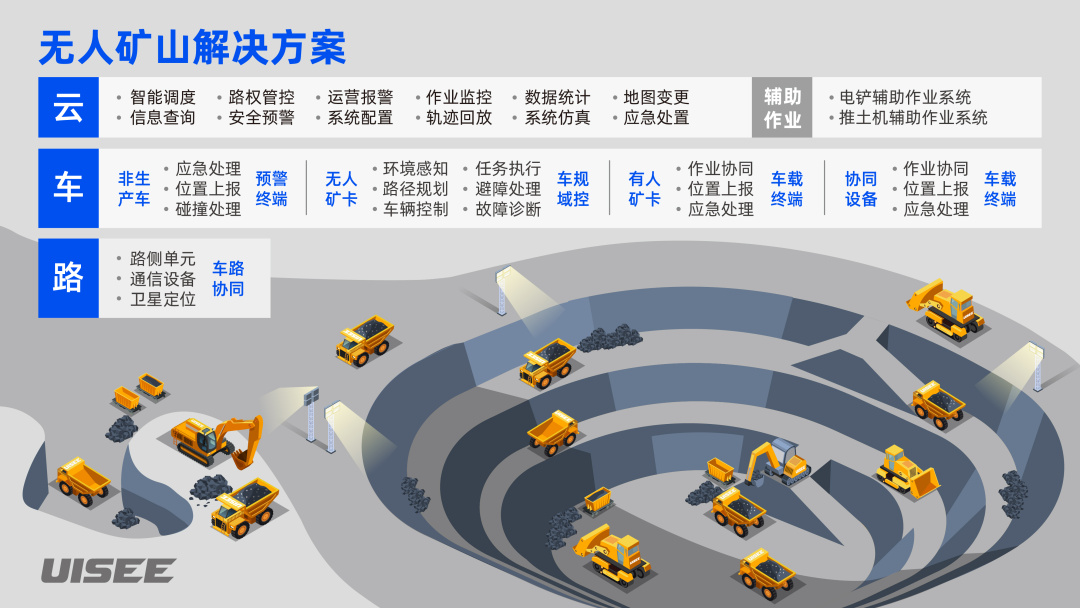
一:云端运营管理平台
通过矿卡车端、路端数据的全流程、自动化采集、存储、传输及分析,不断优化矿卡无人驾驶算法、系统的安全性及用户体验对系统组件做实时和预测性的运维,支持矿卡车无人驾驶应用的运营和管理。
二:全功能车规级智能驾驶控制器
专为L3-L4级矿车自动驾驶提供高性能、高可靠、高度集成的智能驾驶功能控制器可以轻量、灵活部署于各式矿卡车型,满足车规级的量产应用需求。